
1 - 9 of 9
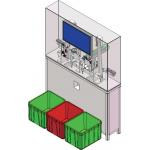
thermos appearance inspection machine
Selling leads

|
Thermos Appearance Inspection Fields of application Inspection of appearance defects in the polishing section of the tiiermos. Functions of the ...
2026-06-21 00:14:58
|
|
... to improve the yield rate of subsequent welding. Functions of the equipment Detect such appearance defects as gaps, burrs, dents, and warping of ...
2026-06-21 00:14:58
|

|
Graphics And Texts Inspection Machine Fields of application Random inspection of incoming printing and packaging materials. Functions of the equipment ...
2026-06-21 00:14:58
|

|
Thermos Body Marking Workstation Fields of application Mark the thermos body. Functions of the equipment Control the rotation of the turntable, ...
2026-06-21 00:14:58
|
|
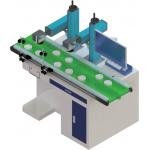
Visual Galvanometer Welding Fields of application Straight welding of thermos. Functions of the equipment Visually locate the welding area, dynamicall...
2026-06-21 00:14:58
|

|
BACKGROUND Cartons are an essential part of the packaging process in many industries and often involve a "carton forming" process. The traditional ...
2025-03-12 17:25:20
|

|
..., cup body and cup bottom in the thermos production line; The system is equipped with high-precision optical devices to realize the precise ...
2026-06-21 00:14:58
|

|
Visual Laser Marking Workstation Fields of application It is used for maiking on thermos to realize maiking on the bottom of plastic-sprayed theimos. ...
2026-06-21 00:14:58
|

|
Pneumatic Soft Gripper - SFG-FCA4-M5072 Product Description The use of machine vision for inspection can not only eliminate the interference of human ...
2025-03-11 11:32:00
|