
Flexible Robot Gripper - SFG-FMA4-M5072
|

|
Flexible Robot Gripper - SFG-FMA4-M5072
Product Description SFG series of flexible soft robot grippers, [man-machine collaboration + lightweight flexible gripping] is committed to providing the perfect solution for industrial automation! One fixture can grasp pieces of different size, shape and weight. Parameter
Advantage Soft, Safe, Durable, Food Safety Has passed FDA, CE, ISO9001 certification One gripper for complex gripping problem Automate with SRT soft robot gripper
Product Detail Standard working lifespan: ≥3,000,000 times Load: 3000g Maximum working pressure: 100 kPa Air tube diameter: 6 mm Weight: 902g
SRT flexible gripper has various models, aiming at different shapes, sizes and weights, it has launched targeted solutions: 1. Ball-like and flat objects should choose circular distributed grippers. Long and slim objects should select symmetric distributedgrippers. 2. Smaller objects should select tight grippers with short fingers. Bigger objects should select adjustable grippers with longer fingers. 3. Lighter objects can select small grippers with less fingers. Heavier objects can select big grippers with more fingers. |
||||||||||||||||||||||||||||||||||||||

|
Flexible Robot Gripper - SFG-FMA4-M5072 |

|
Classic Robot Soft Gripper In Fresh Food Industry--SFG-N Series |

|
Classic Universal Robot Gripper In Food Industry--SFG-N Series |
|
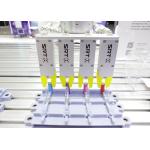
SLG Indirect Drive Gripper Showing The Gripping Of Ampules & Batteries |

|
The Revolutionary Technology Of SRT Soft Robot |

|
Classic Applications In 3C Electronic Industry |